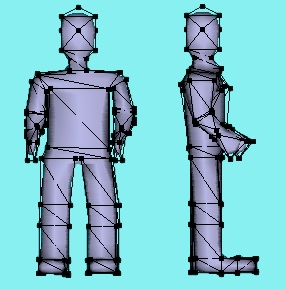
| このチュートリアルでは、簡単な人型フィギュア(walk_model.aoi)を使います。これは直方体を頭部として近似平滑で三角メッシュに変換して、何度も押し出しして胴体・腕・足などを作ったものです。 | |
|
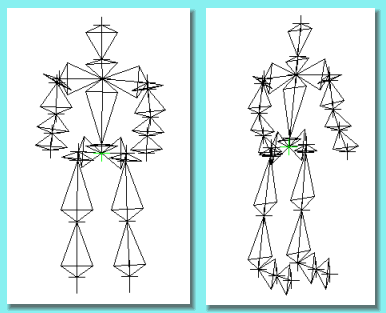
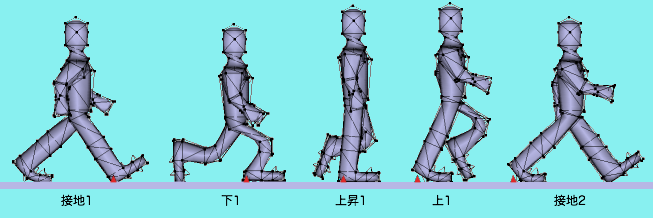
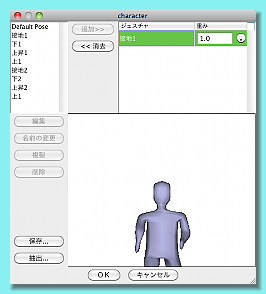
モデルの骨格はとても重要です。モデルのポーズを簡単に作れるよう、骨格は充分に柔軟でなければなりません。このモデルで設定した骨格を右の図に示します。歩行サイクルでは腰・ひざ・足首・つま先・肩・ひじの回転が必要になります。 右の図の遠近法視点で、足首から下の設定が分かります。それぞれ2つの骨があり、「つま先」はほかの部分とは別個に曲がります。これは後で重要になります。 この例ではまた、骨の回転も四肢の前方平面のみに設定しました。つまり足は外側には回転しないということです。もちろんこれは実生活そのままではありませんが、今回の単純な作例では、これでキャラクターのポーズ作りが簡単になります。骨の回転は、メッシュ編集機能の 骨 → 骨を編集... メニューコマンドで調整します。詳しくはメッシュのチュートリアルをご覧ください。 |
 |
|
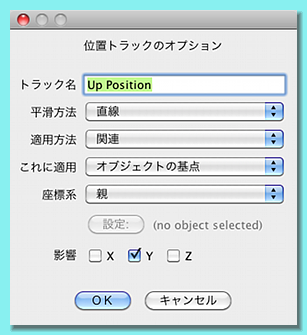
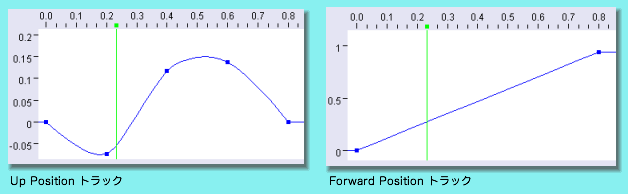
ここから歩行動作についてです。アニメーション → トラックを追加 を2回選択して、新規の Position トラックを2つ追加します。新規の2つのトラックは初期状態の Positon トラックの上に置きます。これは、それより後に実行される、という意味です。 新規のトラックのうちの1つのをダブルクリックしてオプションダイアログを表示、トラック名 を "Up Position" のように付けてください。平滑方法 は「直線」に、適用モード は「関連」にしましょう。 また、このトラックは Y 軸での動作のみを扱うので、影響 は Y のみにします。 もう1つのトラックでもこの設定を繰り返します。名前は "Forward Position" と付けて、影響 を適切に設定します。このチュートリアルでは、キャラクターは X 軸方向に歩きます。 |
 |
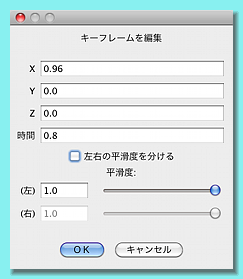 |
X には 0.96 を入力します。このトラックは X 方向のみに影響するので、Y と Z の値は気にしないでください。 一番下の平滑度の設定は気にしなくて大丈夫です。直線平滑方法を設定しているので、この数値は影響しません。このチュートリアルを済ませた後、試しに補間平滑や近似平滑に替えてみると、平滑度の数値の影響が分かりますよ。 |
| 歩行サイクルで最も重要かつ難しいことの1つは、キャラクターの動作で足が床で滑らないようにすることです。この事態を避けるヒントの1つは、マーカーとして別のオブジェクトを置くことです。単純な中実三角形を使いましょう。多角形ツールでこれを1個作り、右の図のように右足のかかとに並べます(よく見えるよう、わざと強調しました)。これが足の支点となるので、前方の位置が変わらないはずです。 | 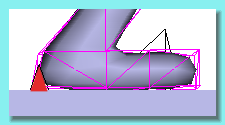 |
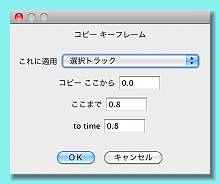 |
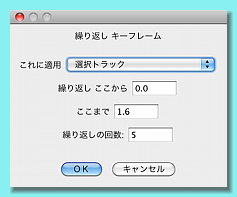
左の図のように値を入力してください。これで2歩目の動作をコピーできます。 |

| 右の図は、地面への足のめり込みをなくす修正をした Up Position トラックです。 | 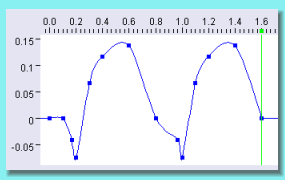 |

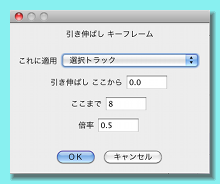 |
例えば左の図の設定で、キャラクターの歩行は2倍速になります。 |